An algorithm is a repeatable process for determining the solution to a problem. An example is shown below:
The goal of Algorithms is to solve a problem in a repeatable way.
For example the problem of find something to watch on TV.
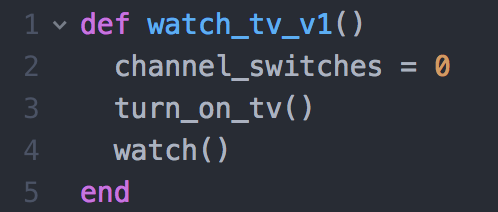
Example1. Finding something to watch on TV
Turn on TV.
Watch what is on
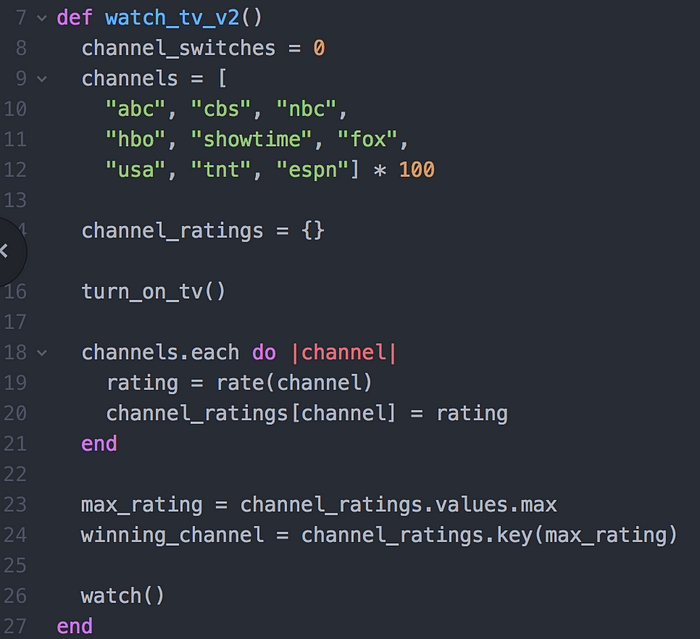
Example 2. Finding something to watch on TV
Turn on TV.
Flip through every channel and rate what is on.
Find the highest rated channel.
Watch
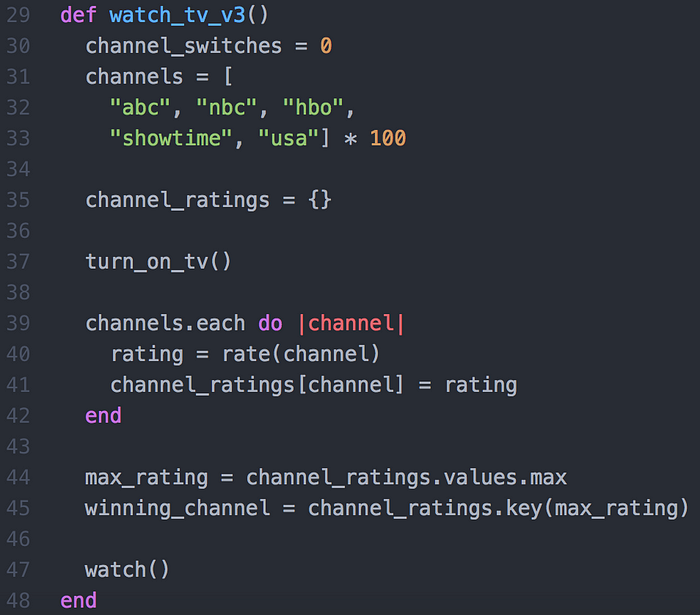
Example 3. Finding something to watch on TV
Turn on TV.
Check 5 favorite channels and rate what is on .
Find the highest rated channel
Watch
Algorithm design refers to a method or mathematical process for problem-solving and engineering algorithms. The design of algorithms is part of many solution theories of operation research, such as dynamic programming and divide-and-conquer. Techniques for designing and implementing algorithm designs are also called algorithm design patterns,[30] such as the template method pattern and decorator pattern.
One of the most important aspects of algorithm design is creating an algorithm that has an efficient run-time, also known as its Big O.
One of the simplest algorithms is to find the largest number in a list of numbers of random order. Finding the solution requires looking at every number in the list. From this follows a simple algorithm, which can be stated in a high-level description in English prose, as:
High-level description:
If there are no numbers in the set then there is no highest number.
Assume the first number in the set is the largest number in the set.
For each remaining number in the set: if this number is larger than the current largest number, consider this number to be the largest number in the set.
When there are no numbers left in the set to iterate over, consider the current largest number to be the largest number of the set.
Algorithm LargestNumber
Input: A list of numbers L.
Output: The largest number in the list L.
ifL.size = 0 return null
largest ← L[0]
for eachiteminL, doifitem > largest, thenlargest ← itemreturnlargest
"←" denotes assignment. For instance, "largest ← item" means that the value of largest changes to the value of item.
"return" terminates the algorithm and outputs the following value.
An animation of the quicksort algorithm sorting an array of randomized values. The red bars mark the pivot element; at the start of the animation, the element farthest to the right-hand side is chosen as the pivot.
Example 2
Euclid's algorithm to compute the greatest common divisor (GCD) to two numbers appears as Proposition II in Book VII ("Elementary Number Theory") of his Elements.[51] Euclid poses the problem thus: "Given two numbers not prime to one another, to find their greatest common measure". He defines "A number [to be] a multitude composed of units": a counting number, a positive integer not including zero. To "measure" is to place a shorter measuring length s successively (q times) along longer length l until the remaining portion r is less than the shorter length s.[52] In modern words, remainder r = l − q×s, q being the quotient, or remainder r is the "modulus", the integer-fractional part left over after the division.[53]
For Euclid's method to succeed, the starting lengths must satisfy two requirements: (i) the lengths must not be zero, AND (ii) the subtraction must be “proper”; i.e., a test must guarantee that the smaller of the two numbers is subtracted from the larger (alternately, the two can be equal so their subtraction yields zero).
Euclid's original proof adds a third requirement: the two lengths must not be prime to one another. Euclid stipulated this so that he could construct a reductio ad absurdum proof that the two numbers' common measure is in fact the greatest.[54] While Nicomachus' algorithm is the same as Euclid's, when the numbers are prime to one another, it yields the number "1" for their common measure. So, to be precise, the following is really Nicomachus' algorithm.
Only a few instruction types are required to execute Euclid's algorithm—some logical tests (conditional GOTO), unconditional GOTO, assignment (replacement), and subtraction.
A location is symbolized by upper case letter(s), e.g. S, A, etc.
The varying quantity (number) in a location is written in lower case letter(s) and (usually) associated with the location's name. For example, location L at the start might contain the number l = 3009.
"Inelegant" is a translation of Knuth's version of the algorithm with a subtraction-based remainder-loop replacing his use of division (or a "modulus" instruction). Derived from Knuth 1973:2–4. Depending on the two numbers "Inelegant" may compute the g.c.d. in fewer steps than "Elegant".
The following algorithm is framed as Knuth's four-step version of Euclid's and Nicomachus', but, rather than using division to find the remainder, it uses successive subtractions of the shorter length s from the remaining length r until r is less than s. The high-level description, shown in boldface, is adapted from Knuth 1973:2–4:
INPUT:
1 [Into two locations L and S put the numbers l and s that represent the two lengths]:
INPUT L, S
2 [Initialize R: make the remaining length r equal to the starting/initial/input length l]:
R ← L
E0: [Ensure r ≥ s.]
3 [Ensure the smaller of the two numbers is in S and the larger in R]:
IF R > S THEN
the contents of L is the larger number so skip over the exchange-steps 4, 5 and 6:
GOTO step 6
ELSE
swap the contents of R and S.
4 L ← R (this first step is redundant, but is useful for later discussion).
5 R ← S
6 S ← L
E1: [Find remainder]: Until the remaining length r in R is less than the shorter length s in S, repeatedly subtract the measuring number s in S from the remaining length r in R.
7 IF S > R THEN
done measuring so
GOTO 10
ELSE
measure again,
8 R ← R − S
9 [Remainder-loop]:
GOTO 7.
E2: [Is the remainder zero?]: EITHER (i) the last measure was exact, the remainder in R is zero, and the program can halt, OR (ii) the algorithm must continue: the last measure left a remainder in R less than measuring number in S.
10 IF R = 0 THEN
done so
GOTO step 15
ELSE
CONTINUE TO step 11,
E3: [Interchange s and r]: The nut of Euclid's algorithm. Use remainder r to measure what was previously smaller number s; L serves as a temporary location.
11 L ← R
12 R ← S
13 S ← L
14 [Repeat the measuring process]:
GOTO 7
The following version of Euclid's algorithm requires only six core instructions to do what thirteen are required to do by "Inelegant"; worse, "Inelegant" requires more types of instructions.[clarify] The flowchart of "Elegant" can be found at the top of this article. In the (unstructured) Basic language, the steps are numbered, and the instruction LET[]=[] is the assignment instruction symbolized by ←.
5REM Euclid's algorithm for greatest common divisor6PRINT"Type two integers greater than 0"10INPUTA,B20IFB=0THENGOTO8030IFA>BTHENGOTO6040LETB=B-A50GOTO2060LETA=A-B70GOTO2080PRINTA90END
How "Elegant" works: In place of an outer "Euclid loop", "Elegant" shifts back and forth between two "co-loops", an A > B loop that computes A ← A − B, and a B ≤ A loop that computes B ← B − A. This works because, when at last the minuend M is less than or equal to the subtrahend S ( Difference = Minuend − Subtrahend), the minuend can become s (the new measuring length) and the subtrahend can become the new r (the length to be measured); in other words the "sense" of the subtraction reverses.
The following version can be used with Object Oriented languages:
// Euclid's algorithm for greatest common divisorinteuclidAlgorithm(intA,intB){A=Math.abs(A);B=Math.abs(B);while(B!=0){if(A>B)A=A-B;elseB=B-A;}returnA;}
A graphical expression of Euclid's algorithm to find the greatest common divisor for 1599 and 650.
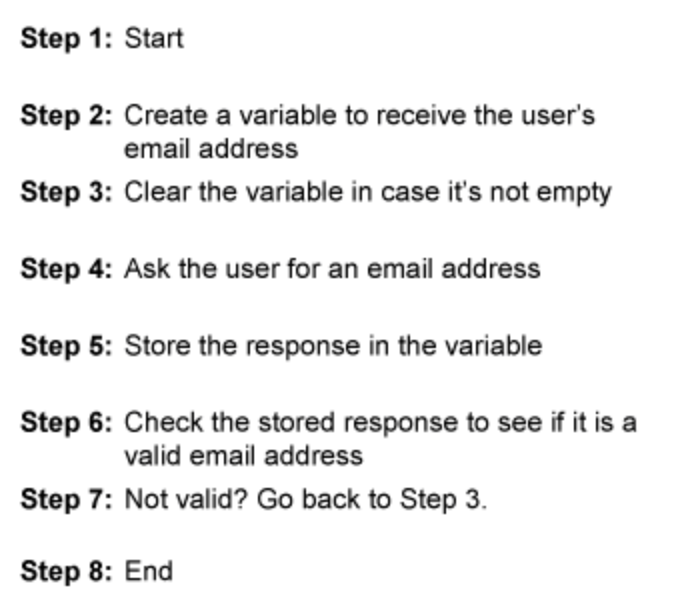
Step 1: Start
Step 2: Declare variables num1, num2 and sum.
Step 3: Read values num1 and num2.
Step 4: Add num1 and num2 and assign the result to sum.
sum←num1+num2
Step 5: Display sum
Step 6: Stop
Step 1: Start
Step 2: Declare variables a,b and c.
Step 3: Read variables a,b and c.
Step 4: If a>b
If a>c
Display a is the largest number.
Else
Display c is the largest number.
Else
If b>c
Display b is the largest number.
Else
Display c is the greatest number.
Step 5: Stop
Write an algorithm to find all roots of a quadratic equation ax2+bx+c=0.
Step 1: Start
Step 2: Declare variables a, b, c, D, x1, x2, rp and ip;
Step 3: Calculate discriminant
D←b2-4ac
Step 4: If D≥0
r1←(-b+√D)/2a
r2←(-b-√D)/2a
Display r1 and r2 as roots.
Else
Calculate real part and imaginary part
rp←b/2a
ip←√(-D)/2a
Display rp+j(ip) and rp-j(ip) as roots
Step 5: Stop
Write an algorithm to find the factorial of a number entered by user.
Step 1: Start
Step 2: Declare variables n,factorial and i.
Step 3: Initialize variables
factorial←1
i←1
Step 4: Read value of n
Step 5: Repeat the steps until i=n
5.1: factorial←factorial*i
5.2: i←i+1
Step 6: Display factorial
Step 7: Stop
Write an algorithm to check whether a number entered by user is prime or not.
Step 1: Start
Step 2: Declare variables n,i,flag.
Step 3: Initialize variables
flag←1
i←2
Step 4: Read n from user.
Step 5: Repeat the steps until i<(n/2)
5.1 If remainder of n÷i equals 0
flag←0
Go to step 6
5.2 i←i+1
Step 6: If flag=0
Display n is not prime
else
Display n is prime
Step 7: Stop
Write an algorithm to find the Fibonacci series till term≤1000.
Step 1: Start
Step 2: Declare variables first_term,second_term and temp.
Step 3: Initialize variables first_term←0 second_term←1
Step 4: Display first_term and second_term
Step 5: Repeat the steps until second_term≤1000
5.1: temp←second_term
5.2: second_term←second_term+first term
5.3: first_term←temp
5.4: Display second_term
Step 6: Stop
Algorithm is not the computer code. Algorithm are just the instructions which gives clear idea to you idea to write the computer code.
Introduction to Decision Trees :
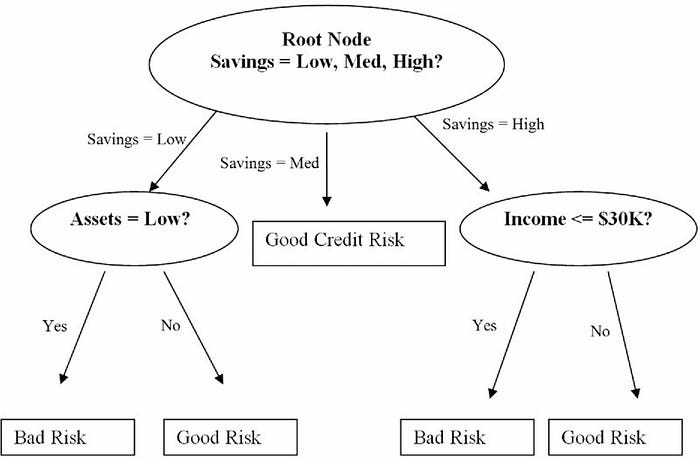
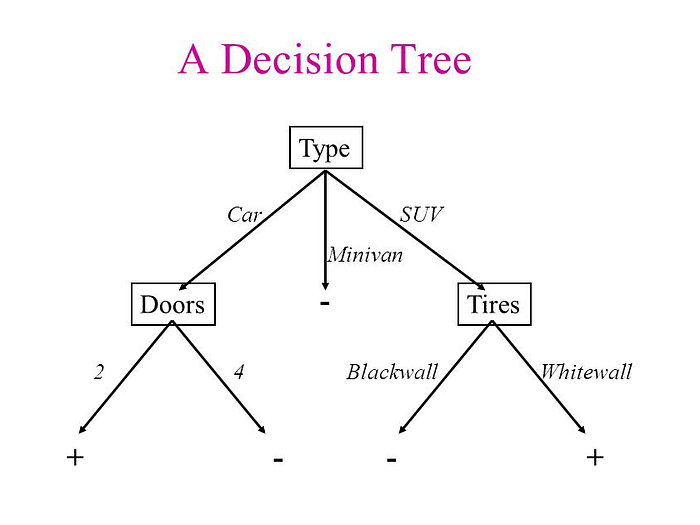
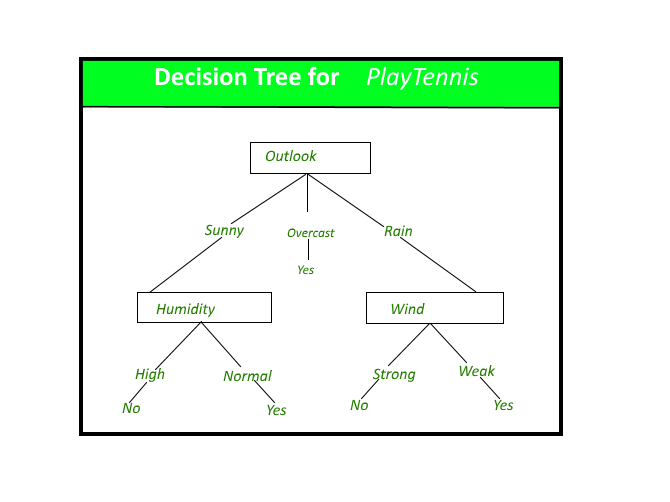
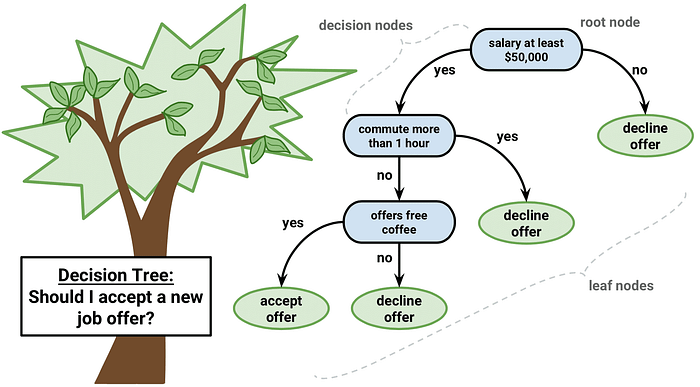
A decision tree is a decision support tool that uses a tree-like graph or model of decisions and their possible consequences, including chance event outcomes, resource costs, and utility. It is one way to display an algorithm that only contains conditional control statements.
A decision tree is a flowchart-like structure in which each internal node represents a “test” on an attribute (e.g. whether a coin flip comes up heads or tails), each branch represents the outcome of the test, and each leaf node represents a class label (decision taken after computing all attributes). The paths from root to leaf represent classification rules.
Tree based learning algorithms are considered to be one of the best and mostly used supervised learning methods. Tree based methods empower predictive models with high accuracy, stability and ease of interpretation. Unlike linear models, they map non-linear relationships quite well. They are adaptable at solving any kind of problem at hand (classification or regression). Decision Tree algorithms are referred to as CART(Classification and Regression Trees).
“The possible solutions to a given problem emerge as the leaves of a tree, each node representing a point of deliberation and decision.”
- Niklaus Wirth (1934 — ), Programming language designer
Methods like decision trees, random forest, gradient boosting are being popularly used in all kinds of data science problems.
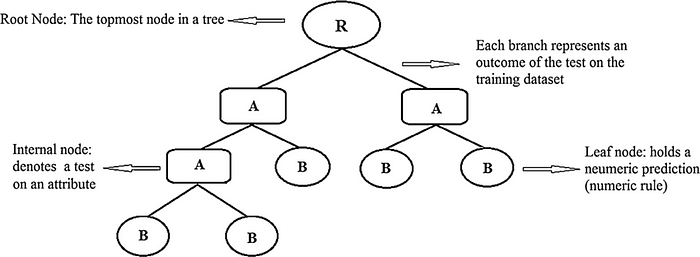
Common terms used with Decision trees:
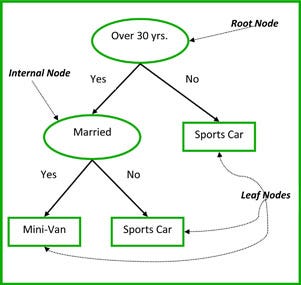
Root Node: It represents entire population or sample and this further gets divided into two or more homogeneous sets.
Splitting: It is a process of dividing a node into two or more sub-nodes.
Decision Node: When a sub-node splits into further sub-nodes, then it is called decision node.
Leaf/ Terminal Node: Nodes do not split is called Leaf or Terminal node.
Pruning: When we remove sub-nodes of a decision node, this process is called pruning. You can say opposite process of splitting.
Branch / Sub-Tree: A sub section of entire tree is called branch or sub-tree.
Parent and Child Node: A node, which is divided into sub-nodes is called parent node of sub-nodes whereas sub-nodes are the child of parent node.
Applications for Decision Tree :
Decision trees have a natural “if … then … else …” construction that makes it fit easily into a programmatic structure. They also are well suited to categorization problems where attributes or features are systematically checked to determine a final category. For example, a decision tree could be used effectively to determine the species of an animal.
As a result, the decision making tree is one of the more popular classification algorithms being used in Data Mining and Machine Learning. Example applications include:
· Evaluation of brand expansion opportunities for a business using historical sales data
· Determination of likely buyers of a product using demographic data to enable targeting of limited advertisement budget
· Prediction of likelihood of default for applicant borrowers using predictive models generated from historical data
· Help with prioritization of emergency room patient treatment using a predictive model based on factors such as age, blood pressure, gender, location and severity of pain, and other measurements
· Decision trees are commonly used in operations research, specifically in decision analysis, to help identify a strategy most likely to reach a goal.
Because of their simplicity, tree diagrams have been used in a broad range of industries and disciplines including civil planning, energy, financial, engineering, healthcare, pharmaceutical, education, law, and business.
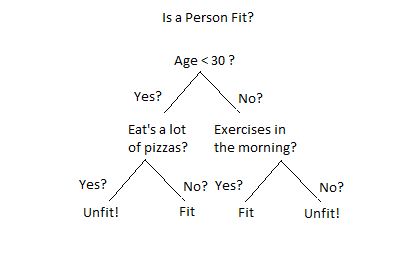
How does Decision Tree works ?
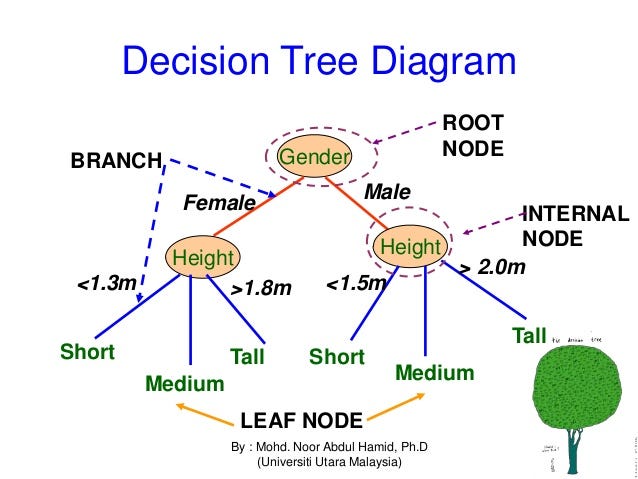
Decision tree is a type of supervised learning algorithm (having a pre-defined target variable) that is mostly used in classification problems. It works for both categorical and continuous input and output variables. In this technique, we split the population or sample into two or more homogeneous sets (or sub-populations) based on most significant splitter / differentiator in input variables.
Example:-
Let’s say we have a sample of 30 students with three variables Gender (Boy/ Girl), Class (IX/ X) and Height (5 to 6 ft). 15 out of these 30 play cricket in leisure time. Now, we want to create a model to predict who will play cricket during leisure period? In this problem, we need to segregate students who play cricket in their leisure time based on highly significant input variable among all three.
This is where decision tree helps, it will segregate the students based on all values of three variable and identify the variable, which creates the best homogeneous sets of students (which are heterogeneous to each other). In the snapshot below, you can see that variable Gender is able to identify best homogeneous sets compared to the other two variables.
Decision tree identifies the most significant variable and its value that gives best homogeneous sets of population. To identify the variable and the split, decision tree uses various algorithms.
Types of Decision Trees
Types of decision tree is based on the type of target variable we have. It can be of two types:
Categorical Variable Decision Tree: Decision Tree which has categorical target variable then it called as categorical variable decision tree. E.g.:- In above scenario of student problem, where the target variable was “Student will play cricket or not” i.e. YES or NO.
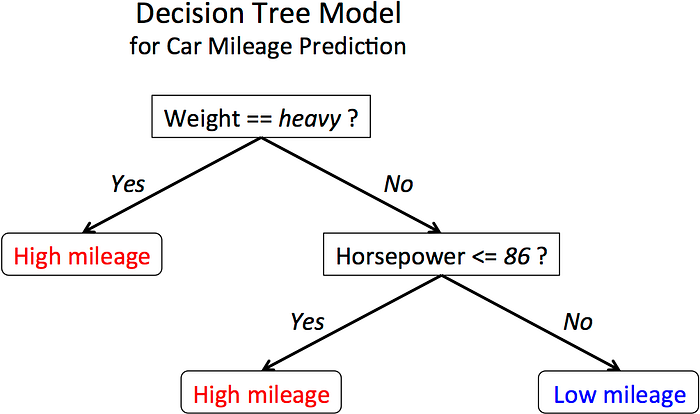
Continuous Variable Decision Tree: Decision Tree has continuous target variable then it is called as Continuous Variable Decision Tree.
E.g.:- Let’s say we have a problem to predict whether a customer will pay his renewal premium with an insurance company (yes/ no). Here we know that income of customer is a significant variable but insurance company does not have income details for all customers. Now, as we know this is an important variable, then we can build a decision tree to predict customer income based on occupation, product and various other variables. In this case, we are predicting values for continuous variable.
Decision Tree Algorithm Pseudocode
The decision tree algorithm tries to solve the problem, by using tree representation. Each internal node of the tree corresponds to an attribute, and each leaf node corresponds to a class label.
Place the best attribute of the dataset at the root of the tree.
Split the training set into subsets. Subsets should be made in such a way that each subset contains data with the same value for an attribute.
Repeat step 1 and step 2 on each subset until you find leaf nodes in all the branches of the tree.
In decision trees, for predicting a class label for a record we start from the root of the tree. We compare the values of the root attribute with record’s attribute. On the basis of comparison, we follow the branch corresponding to that value and jump to the next node.
We continue comparing our record’s attribute values with other internal nodes of the tree until we reach a leaf node with predicted class value. The modeled decision tree can be used to predict the target class or the value.
Assumptions while creating Decision Tree
Some of the assumptions we make while using Decision tree:
At the beginning, the whole training set is considered as the root.
Feature values are preferred to be categorical. If the values are continuous then they are discretized prior to building the model.
Records are distributed recursively on the basis of attribute values.
Order to placing attributes as root or internal node of the tree is done by using some statistical approach.
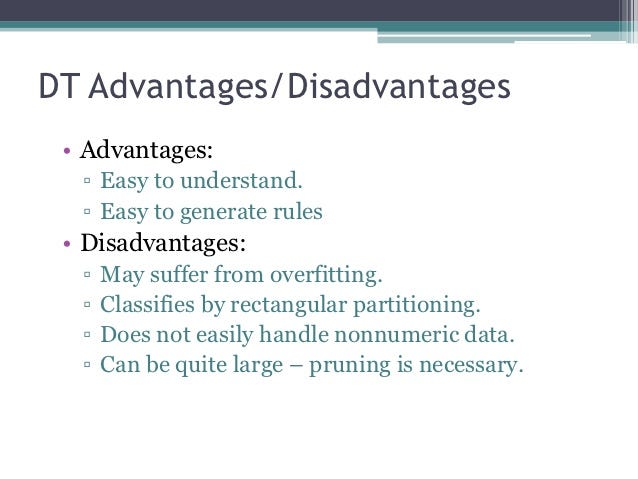
Advantages of Decision Tree:
Easy to Understand: Decision tree output is very easy to understand even for people from non-analytical background. It does not require any statistical knowledge to read and interpret them. Its graphical representation is very intuitive and users can easily relate their hypothesis.
Useful in Data exploration: Decision tree is one of the fastest way to identify most significant variables and relation between two or more variables. With the help of decision trees, we can create new variables / features that has better power to predict target variable. It can also be used in data exploration stage. For e.g., we are working on a problem where we have information available in hundreds of variables, there decision tree will help to identify most significant variable.
Decision trees implicitly perform variable screening or feature selection.
Decision trees require relatively little effort from users for data preparation.
Less data cleaning required: It requires less data cleaning compared to some other modeling techniques. It is not influenced by outliers and missing values to a fair degree.
Data type is not a constraint: It can handle both numerical and categorical variables. Can also handle multi-output problems.
Non-Parametric Method: Decision tree is considered to be a non-parametric method. This means that decision trees have no assumptions about the space distribution and the classifier structure.
Non-linear relationships between parameters do not affect tree performance.
The number of hyper-parameters to be tuned is almost null.
Disadvantages of Decision Tree:
Over fitting: Decision-tree learners can create over-complex trees that do not generalize the data well. This is called overfitting. Over fitting is one of the most practical difficulty for decision tree models. This problem gets solved by setting constraints on model parameters and pruning.
Not fit for continuous variables: While working with continuous numerical variables, decision tree loses information, when it categorizes variables in different categories.
Decision trees can be unstable because small variations in the data might result in a completely different tree being generated. This is called variance, which needs to be lowered by methods like bagging and boosting.
Greedy algorithms cannot guarantee to return the globally optimal decision tree. This can be mitigated by training multiple trees, where the features and samples are randomly sampled with replacement.
Decision tree learners create biased trees if some classes dominate. It is therefore recommended to balance the data set prior to fitting with the decision tree.
Information gain in a decision tree with categorical variables gives a biased response for attributes with greater no. of categories.
Generally, it gives low prediction accuracy for a dataset as compared to other machine learning algorithms.
Calculations can become complex when there are many class label.
Regression Trees vs Classification Trees
The terminal nodes (or leaves) lies at the bottom of the decision tree. This means that decision trees are typically drawn upside down such that leaves are the bottom & roots are the tops.
Both the trees work almost similar to each other. The primary differences and similarities between Classification and Regression Trees are:
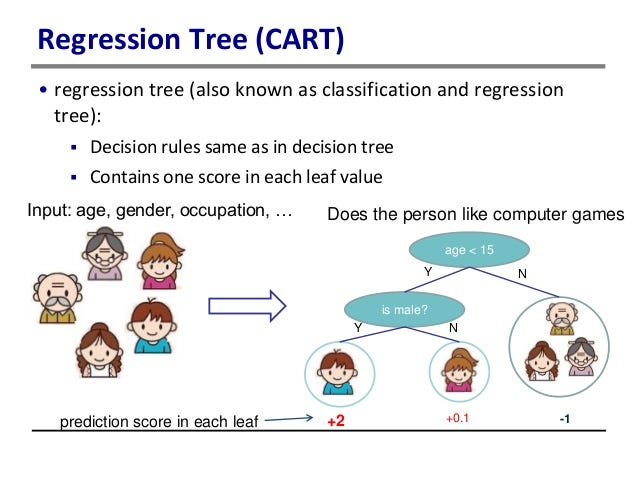
Regression trees are used when dependent variable is continuous. Classification Trees are used when dependent variable is categorical.
In case of Regression Tree, the value obtained by terminal nodes in the training data is the mean response of observation falling in that region. Thus, if an unseen data observation falls in that region, we’ll make its prediction with mean value.
In case of Classification Tree, the value (class) obtained by terminal node in the training data is the mode of observations falling in that region. Thus, if an unseen data observation falls in that region, we’ll make its prediction with mode value.
Both the trees divide the predictor space (independent variables) into distinct and non-overlapping regions.
Both the trees follow a top-down greedy approach known as recursive binary splitting. We call it as ‘top-down’ because it begins from the top of tree when all the observations are available in a single region and successively splits the predictor space into two new branches down the tree. It is known as ‘greedy’ because, the algorithm cares (looks for best variable available) about only the current split, and not about future splits which will lead to a better tree.
This splitting process is continued until a user defined stopping criteria is reached. For e.g.: we can tell the algorithm to stop once the number of observations per node becomes less than 50.
In both the cases, the splitting process results in fully grown trees until the stopping criteria is reached. But, the fully grown tree is likely to over fit data, leading to poor accuracy on unseen data. This bring ‘pruning’. Pruning is one of the technique used tackle overfitting.
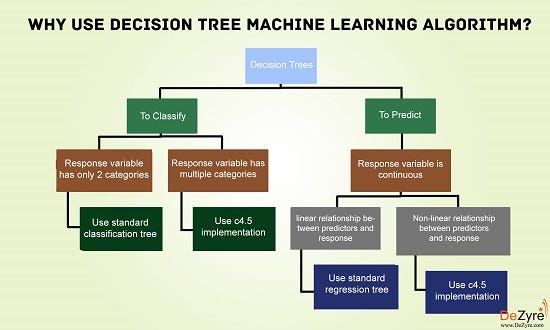
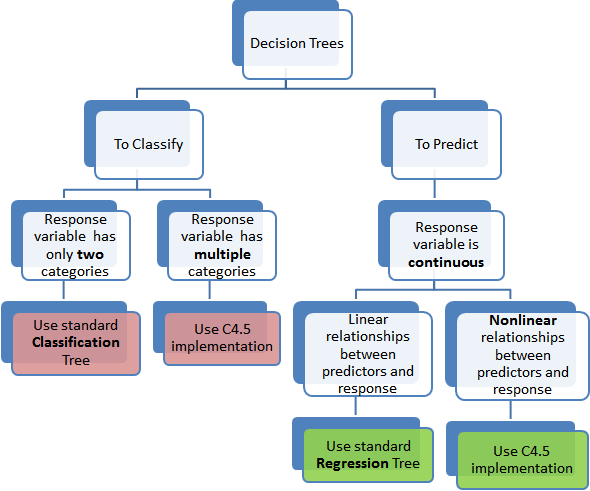
This tree below summarizes at a high level the types of decision trees available.
How does a tree decide where to split?
The decision of making strategic splits heavily affects a tree’s accuracy. The decision criteria is different for classification and regression trees.
Decision trees use multiple algorithms to decide to split a node in two or more sub-nodes. The creation of sub-nodes increases the homogeneity of resultant sub-nodes. In other words, we can say that purity of the node increases with respect to the target variable. Decision tree splits the nodes on all available variables and then selects the split which results in most homogeneous sub-nodes.
The algorithm selection is also based on type of target variables. The four most commonly used algorithms in decision tree are:
Gini Index
Gini index says, if we select two items from a population at random then they must be of same class and probability for this is 1 if population is pure.
It works with categorical target variable “Success” or “Failure”.
It performs only Binary splits
Higher the value of Gini higher the homogeneity.
CART (Classification and Regression Tree) uses Gini method to create binary splits.
Steps to Calculate Gini for a split
Calculate Gini for sub-nodes, using formula sum of square of probability for success and failure (p²+q²).
Calculate Gini for split using weighted Gini score of each node of that split
Chi-Square
It is an algorithm to find out the statistical significance between the differences between sub-nodes and parent node. We measure it by sum of squares of standardized differences between observed and expected frequencies of target variable.
It works with categorical target variable “Success” or “Failure”.
It can perform two or more splits.
Higher the value of Chi-Square higher the statistical significance of differences between sub-node and Parent node.
Chi-Square of each node is calculated using formula,
Chi-square = ((Actual — Expected)² / Expected)¹/2
It generates tree called CHAID (Chi-square Automatic Interaction Detector)
Steps to Calculate Chi-square for a split:
Calculate Chi-square for individual node by calculating the deviation for Success and Failure both
Calculated Chi-square of Split using Sum of all Chi-square of success and Failure of each node of the split
Information Gain:
Less impure node requires less information to describe it. And, more impure node requires more information. Information theory is a measure to define this degree of disorganization in a system known as Entropy. If the sample is completely homogeneous, then the entropy is zero and if the sample is an equally divided (50% — 50%), it has entropy of one.
Entropy can be calculated using formula:- Entropy = -p log2 p — q log2q
Here p and q is probability of success and failure respectively in that node. Entropy is also used with categorical target variable. It chooses the split which has lowest entropy compared to parent node and other splits. The lesser the entropy, the better it is.
Steps to calculate entropy for a split:
Calculate entropy of parent node
Calculate entropy of each individual node of split and calculate weighted average of all sub-nodes available in split.
We can derive information gain from entropy as 1- Entropy.
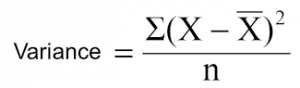
Reduction in Variance
Reduction in variance is an algorithm used for continuous target variables (regression problems). This algorithm uses the standard formula of variance to choose the best split. The split with lower variance is selected as the criteria to split the population:
Above X-bar is mean of the values, X is actual and n is number of values.
Steps to calculate Variance:
Calculate variance for each node.
Calculate variance for each split as weighted average of each node variance.
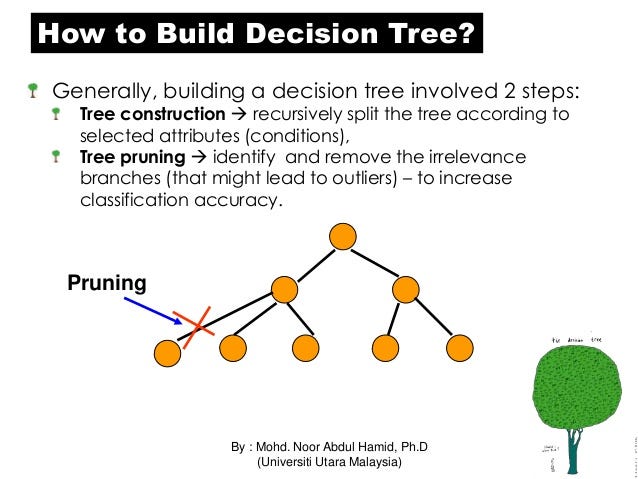
Key parameters of tree modelling and how can we avoid over-fitting in decision trees:
Overfitting is one of the key practical challenges faced while modeling decision trees. If there is no limit set of a decision tree, it will give you 100% accuracy on training set because in the worst case, it will end up making 1 leaf for each observation. The model is having an issue of overfitting, is considered when the algorithm continues to go deeper and deeper to reduce the training set error but results with an increased test set error i.e. accuracy of prediction for our model goes down. It generally happens when it builds many branches due to outliers and irregularities in data. Thus, preventing overfitting is pivotal while modeling a decision tree and it can be done in 2 ways:
Setting constraints on tree size
Tree pruning
Setting Constraints on Tree Size
This can be done by using various parameters which are used to define a tree. The parameters used for defining a tree are:
Minimum samples for a node split
Defines the minimum number of samples (or observations) which are required in a node to be considered for splitting.
Used to control over-fitting. Higher values prevent a model from learning relations which might be highly specific to the particular sample selected for a tree.
Too high values can lead to under-fitting hence, it should be tuned using CV.
Minimum samples for a terminal node (leaf)
Defines the minimum samples (or observations) required in a terminal node or leaf.
Used to control over-fitting similar to min_samples_split.
Generally lower values should be chosen for imbalanced class problems because the regions in which the minority class will be in majority will be very small.
Maximum depth of tree (vertical depth)
The maximum depth of a tree.
Used to control over-fitting as higher depth will allow model to learn relations very specific to a particular sample.
Should be tuned using CV.
Maximum number of terminal nodes
The maximum number of terminal nodes or leaves in a tree.
Can be defined in place of max_depth. Since binary trees are created, a depth of ’n’ would produce a maximum of 2^n leaves.
Maximum features to consider for split
The number of features to consider while searching for a best split. These will be randomly selected.
As a thumb-rule, square root of the total number of features works great but we should check upto 30–40% of the total number of features.
Higher values can lead to over-fitting but depends on case to case.
Tree Pruning
The technique of setting constraint is a greedy-approach. In other words, it will check for the best split instantaneously and move forward until one of the specified stopping condition is reached. For e.g.: consider the following case when you’re driving:
There are 2 lanes:
A lane with cars moving at 80 km/h
A lane with trucks moving at 30 km/h
At this instant, you are the yellow car and you have 2 choices:
Take a left and overtake the other 2 cars quickly
Keep moving in the present lane
Analyzing these choice: In the former choice, you’ll immediately overtake the car ahead and reach behind the truck and start moving at 30 km/h, looking for an opportunity to move back right. All cars originally behind you move ahead in the meanwhile. This would be the optimum choice if your objective is to maximize the distance covered in next say 10 seconds. In the later choice, you drive through at same speed, cross trucks and then overtake maybe depending on situation ahead.
This is exactly the difference between normal decision tree & pruning. A decision tree with constraints won’t see the truck ahead and adopt a greedy approach by taking a left. On the other hand if we use pruning, we in effect look at a few steps ahead and make a choice.
So we know, pruning is better. To implement it in decision tree:
We first make the decision tree to a large depth.
Then we start at the bottom and start removing leaves which are giving us negative returns when compared from the top.
Suppose a split is giving us a gain of say -10 (loss of 10) and then the next split on that gives us a gain of 20. A simple decision tree will stop at step 1 but in pruning, we will see that the overall gain is +10 and keep both leaves.
Are tree based models better than linear models?
If one can use logistic regression for classification problems and linear regression for regression problems, why is there a need to use trees? Actually, we can use any algorithm. It is dependent on the type of problem we are solving. Some key factors which will help us to decide which algorithm to use:
If the relationship between dependent & independent variable is well approximated by a linear model, linear regression will outperform tree based model.
If there is a high non-linearity and complex relationship between dependent & independent variables, a tree model will outperform a classical regression method.
To build a model which is easy to explain to people, a decision tree model will always do better than a linear model. Decision tree models are even simpler to interpret than linear regression.e.g. Decison Tree Classification
From Tree to Rules :
How Decision Trees work: Algorithm
· Build tree
· Start with data at root node
· Select an attribute and formulate a logical test on attribute
· Branch on each outcome of the test, and move subset of examples satisfying that outcome to corresponding child node
· Recurse on each child node
· Repeat until leaves are “pure”, i.e., have example from a single class, or “nearly pure”, i.e., majority of examples are from the same class
· Prune tree
· Remove subtrees that do not improve classification accuracy
· Avoid over-fitting, i.e., training set specific artifacts
· Build tree
· Evaluate split-points for all attributes
· Select the “best” point and the “winning” attribute
· Split the data into two
· Breadth/depth-first construction
· CRITICAL STEPS:
· Formulation of good split tests
· Selection measure for attributes
How to capture good splits?
· Prefer the simplest hypothesis that fits the data
· Minimum message/description length
· Dataset D
· Hypotheses H1, H2, …, Hx describing D
· MML(Hi) = Mlength(Hi)+Mlength(D|Hi)
· Pick Hk with minimum MML
· Mlength given by Gini index, Gain, etc.
Tree pruning
Data encoding: sum classification errors
Model encoding:
· Encode the tree structure
· Encode the split points
Pruning: choose smallest length option
· Convert to leaf
· Prune left or right child
· Do nothing
Hunt’s Method
· Attributes: Refund (Yes, No), Marital Status (Single, Married, Divorced), Taxable Income
· Class: Cheat, Don’t Cheat
Finding good split points
· Use Gini index for partition purity
· If S is pure, Gini(S) = 0, Gini is a kind of entropy calculation
· Find split-point with minimum Gini
· Only need class distributions
How informative is an attribute ? :
· Statistic measure of informativity, measuring how well an attribute distinguishes between examples of different classes.
· Informativity is measured as the decrease in entropy of the training set of examples.
· Entropy is the measure of impurity of the sample set: E(S) = -p+log2p+ — p-log2p-
Working with Decision Trees in Python:
#Import Library
# Import other necessary libraries like pandas, numpy…
from sklearn import tree
# Assumed you have, X (predictor) and Y (target) for training data set and x_test (predictor) of test_dataset
# Create tree object
model = tree.DecisionTreeClassifier(criterion=’gini’) # for classification, here you can change the algorithm as gini or entropy (information gain) by default it is gini
# model = tree.DecisionTreeRegressor() for regression
# Train the model using the training sets and check score
model.fit(X, y)
model.score(X, y)
#Predict Output
predicted = model.predict(x_test)
Summary :
Not all problems can be solved with linear methods. The world is non-linear. It has been observed that tree based models have been able to map non-linearity effectively. Methods like decision trees, random forest, gradient boosting are being popularly used in all kinds of data science problems.
Decision Tree algorithm belongs to the family of supervised learning algorithms. Unlike other supervised learning algorithms, decision tree algorithm can be used for solving regression and classification problemstoo. The general motive of using Decision Tree is to create a training model which can use to predict class or value of target variables by learning decision rules inferred from prior data (training data). The primary challenge in the decision tree implementation is to identify which attributes do we need to consider as the root node and each level. Decision tress often mimic the human level thinking so it’s simple to understand the data and make some good interpretations.
Dividing efficiently based on maximum information gain is key to decision tree classifier. However, in real world with millions of data dividing into pure class in practically not feasible (it may take longer training time) and so we stop at points in nodes of tree when fulfilled with certain parameters (for example impurity percentage). Decision tree is classification strategy as opposed to the algorithm for classification. It takes top down approach and uses divide and conquer method to arrive at decision. We can have multiple leaf classes with this approach.
“When your values are clear to you, making decisions become easier.” — Roy E. Disney
Lee’s Algorithm
The Lee algorithm is one possible solution for maze routing problems. It always gives an optimal solution, if one exists, but is slow and requires large memory for dense layout.
Understanding how it works
The algorithm is a breadth-first based algorithm that uses queues to store the steps. It usually uses the following steps:
Choose a starting point and add it to the queue.
Add the valid neighboring cells to the queue.
Remove the position you are on from the queue and continue to the next element.
Repeat steps 2 and 3 until the queue is empty.
Implementation
C++ has the queue already implemented in the <queue> library, but if you are using something else you are welcome to implement your own version of queue.
C++ code:
int dl[] = {-1, 0, 1, 0}; // these arrays will help you travel in the 4 directions more easily
int dc[] = {0, 1, 0, -1};
queue<int> X, Y; // the queues used to get the positions in the matrix
X.push(start_x); //initialize the queues with the start position
Y.push(start_y);
void lee()
{
int x, y, xx, yy;
while(!X.empty()) // while there are still positions in the queue
{
x = X.front(); // set the current position
y = Y.front();
for(int i = 0; i < 4; i++)
{
xx = x + dl[i]; // travel in an adiacent cell from the current position
yy = y + dc[i];
if('position is valid') //here you should insert whatever conditions should apply for your position (xx, yy)
{
X.push(xx); // add the position to the queue
Y.push(yy);
mat[xx][yy] = -1; // you usually mark that you have been to this position in the matrix
}
}
X.pop(); // eliminate the first position, as you have no more use for it
Y.pop();
}
}



















No comments:
Post a Comment